- Messaggi: 35
- Ringraziamenti ricevuti 2
Ponte H e Segway
11 Anni 1 Mese fa - 11 Anni 1 Mese fa #1
da aduri
Ponte H e Segway è stato creato da aduri
Salve a tutti,
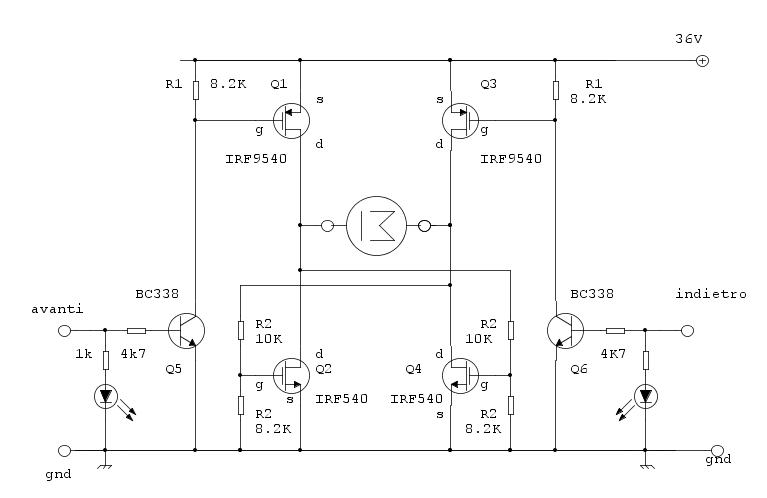
nel week end piovoso ho provato questo ponte H con un motore che assorbiva 200mA a 21V.
Non ho messo i diodi di ricircolo perché sono integrati nei MOSFET che sopportano oltre 20A e 100V max.
La Vg max ammessa è +-20V.
Volevo sapere se, secondo voi, mettendo dei discreti dissipatori questo ponte riesce ad alimentare in ciclo continuo
un motore da 500W 36 V che assorbe quindi 14A circa ai fini della costruzione di un segway con un gruppo di appassionati della mia città.
Ho messo una resistenza di caduta da 10Kohm per avere una tensione di gate non superiore ai 20V max accettati .
L’idea è di controllarlo tramite giroscopio e arduino in PWM (in alternativa io proporrei il PIC).
Un membro del gruppo ha esperienza e ne ha già costruito uno funzionante con 2 motori da 250W, driver commerciali e arduino con giroscopio.
Ho letto l’ottimo tutorial del sito dove nella descrizione dei ponti H vengono usati MOSFET di potenza tutti a canale N mentre io ho usato 2 MOSFET complementari.
Secondo voi con questo circuito è gestibile un’applicazione del genere e quali sono le problematiche che secondo voi dovrei affrontare?
Ho visto che la frenatura del sistema si può ottenere facendo condurre i 2 lati alti del ponte con i 2 PMOS.
ciao e grazie
Antonio
Allego anche file in fidocadj per eventuali modifiche al circuito:
[FIDOCAD]
LI 40 150 235 150 0
LI 40 150 30 150 0
LI 30 150 25 150 0
LI 40 110 30 110 0
MC 35 115 0 0 115
LI 35 115 35 110 0
MC 35 125 1 0 220
LI 35 140 35 150 0
MC 50 110 1 0 115
MC 50 110 0 0 300
FCJ
TY 55 120 4 3 0 0 0 * Q5
TY 70 100 4 3 0 0 0 *
LI 65 120 65 150 0
LI 65 40 65 100 0
LI 85 40 65 40 0
MC 65 25 0 0 115
FCJ
TY 55 25 4 3 0 0 0 * R1
TY 70 25 4 3 0 0 0 * 8.2K
LI 65 40 65 35 0
LI 65 25 65 20 0
LI 100 30 100 20 0
LI 100 90 170 90 0
LI 150 95 80 95 0
LI 170 115 170 125 0
LI 80 115 80 125 0
SA 35 110 0
SA 65 40 0
SA 65 150 0
SA 35 150 0
SA 100 150 0
SA 150 150 0
SA 150 20 0
SA 100 20 0
MC 140 75 1 0 540
LI 100 50 100 115 0
MC 105 75 0 0 000
MC 145 75 2 0 000
LI 105 75 100 75 0
SA 100 75 0
SA 150 75 0
MC 230 20 0 0 010
MC 35 150 0 0 045
MC 25 150 2 0 000
MC 25 110 2 0 000
LI 30 110 25 110 0
MC 235 150 0 0 000
LI 100 135 100 150 0
LI 65 20 230 20 0
TY 45 95 5 3 0 0 0 * BC338
TY 40 115 5 3 0 0 0 * 4k7
TY 25 115 5 3 0 0 0 * 1k
TY 10 100 5 3 0 0 0 * avanti
TY 225 95 5 3 0 0 0 * indietro
TY 235 150 5 3 0 0 0 * gnd
TY 15 155 5 3 0 0 0 * gnd
TY 225 10 5 3 0 0 0 * 36V
MC 85 40 2 1 420
FCJ
TY 90 25 4 3 0 0 0 * Q1
TY 75 50 4 3 0 0 0 * IRF9540
MC 85 125 0 0 410
FCJ
TY 105 120 4 3 0 0 0 * Q2
TY 105 130 4 3 0 0 0 * IRF540
MC 80 130 0 0 115
FCJ
TY 85 135 4 3 0 0 0 * R2
TY 85 140 4 3 0 0 0 * 8.2K
LI 80 125 80 130 0
LI 85 125 80 125 0
LI 80 140 80 150 0
SA 80 150 0
SA 80 150 0
LI 210 150 25 150 0
LI 210 150 220 150 0
LI 220 150 225 150 0
LI 210 110 220 110 0
MC 215 115 0 1 115
LI 215 115 215 110 0
MC 215 125 1 1 220
LI 215 140 215 150 0
MC 200 110 1 1 115
MC 200 110 0 1 300
FCJ
TY 190 120 4 3 0 0 0 * Q6
TY 195 100 4 3 0 0 0 *
LI 185 120 185 150 0
LI 185 40 185 100 0
LI 165 40 185 40 0
MC 185 25 0 1 115
FCJ
TY 195 25 4 3 0 0 0 * R1
TY 190 30 4 3 0 0 0 * 8.2K
LI 185 40 185 35 0
LI 185 25 185 20 0
LI 150 30 150 20 0
SA 215 110 0
SA 185 40 0
SA 185 150 0
SA 215 150 0
SA 150 150 0
SA 150 20 0
LI 150 50 150 115 0
MC 145 75 0 1 000
LI 145 75 150 75 0
SA 150 75 0
MC 215 150 0 1 045
MC 225 110 2 1 000
LI 220 110 225 110 0
LI 150 135 150 150 0
LI 205 20 60 20 0
MC 165 40 2 0 420
FCJ
TY 160 25 4 3 0 0 0 * Q3
TY 160 50 4 3 0 0 0 * IRF9540
MC 165 125 0 1 410
FCJ
TY 135 120 4 3 0 0 0 * Q4
TY 130 130 4 3 0 0 0 * IRF540
MC 170 130 0 1 115
FCJ
TY 160 135 4 3 0 0 0 * R2
TY 155 140 4 3 0 0 0 * 8.2K
LI 170 125 170 130 0
LI 165 125 170 125 0
LI 170 140 170 150 0
SA 170 150 0
SA 170 150 0
SA 65 20 0
SA 185 20 0
TY 190 95 5 3 0 0 0 * BC338
TY 200 115 5 3 0 0 0 * 4K7
SA 170 125 0
SA 100 90 0
SA 80 125 0
SA 150 95 0
MC 80 105 0 0 115
FCJ
TY 85 105 4 3 0 0 0 * R2
TY 85 110 4 3 0 0 0 * 10K
MC 170 105 0 0 115
FCJ
TY 160 105 4 3 0 0 0 * R2
TY 155 110 4 3 0 0 0 * 10K
LI 80 95 80 105 0
LI 170 90 170 105 0
TY 145 30 5 3 0 0 0 * s
TY 160 40 5 3 0 0 0 * g
TY 145 45 5 3 0 0 0 * d
TY 145 135 5 3 0 0 0 * s
TY 160 125 5 3 0 0 0 * g
TY 145 115 5 3 0 0 0 * d
TY 95 130 5 3 0 0 0 * s
TY 85 125 5 3 0 0 0 * g
TY 105 115 5 3 0 0 0 * d
TY 105 30 5 3 0 0 0 * s
TY 85 40 5 3 0 0 0 * g
TY 105 45 5 3 0 0 0 * d
nel week end piovoso ho provato questo ponte H con un motore che assorbiva 200mA a 21V.
Non ho messo i diodi di ricircolo perché sono integrati nei MOSFET che sopportano oltre 20A e 100V max.
La Vg max ammessa è +-20V.
Volevo sapere se, secondo voi, mettendo dei discreti dissipatori questo ponte riesce ad alimentare in ciclo continuo
un motore da 500W 36 V che assorbe quindi 14A circa ai fini della costruzione di un segway con un gruppo di appassionati della mia città.
Ho messo una resistenza di caduta da 10Kohm per avere una tensione di gate non superiore ai 20V max accettati .
L’idea è di controllarlo tramite giroscopio e arduino in PWM (in alternativa io proporrei il PIC).
Un membro del gruppo ha esperienza e ne ha già costruito uno funzionante con 2 motori da 250W, driver commerciali e arduino con giroscopio.
Ho letto l’ottimo tutorial del sito dove nella descrizione dei ponti H vengono usati MOSFET di potenza tutti a canale N mentre io ho usato 2 MOSFET complementari.
Secondo voi con questo circuito è gestibile un’applicazione del genere e quali sono le problematiche che secondo voi dovrei affrontare?
Ho visto che la frenatura del sistema si può ottenere facendo condurre i 2 lati alti del ponte con i 2 PMOS.
ciao e grazie
Antonio
Allego anche file in fidocadj per eventuali modifiche al circuito:
[FIDOCAD]
LI 40 150 235 150 0
LI 40 150 30 150 0
LI 30 150 25 150 0
LI 40 110 30 110 0
MC 35 115 0 0 115
LI 35 115 35 110 0
MC 35 125 1 0 220
LI 35 140 35 150 0
MC 50 110 1 0 115
MC 50 110 0 0 300
FCJ
TY 55 120 4 3 0 0 0 * Q5
TY 70 100 4 3 0 0 0 *
LI 65 120 65 150 0
LI 65 40 65 100 0
LI 85 40 65 40 0
MC 65 25 0 0 115
FCJ
TY 55 25 4 3 0 0 0 * R1
TY 70 25 4 3 0 0 0 * 8.2K
LI 65 40 65 35 0
LI 65 25 65 20 0
LI 100 30 100 20 0
LI 100 90 170 90 0
LI 150 95 80 95 0
LI 170 115 170 125 0
LI 80 115 80 125 0
SA 35 110 0
SA 65 40 0
SA 65 150 0
SA 35 150 0
SA 100 150 0
SA 150 150 0
SA 150 20 0
SA 100 20 0
MC 140 75 1 0 540
LI 100 50 100 115 0
MC 105 75 0 0 000
MC 145 75 2 0 000
LI 105 75 100 75 0
SA 100 75 0
SA 150 75 0
MC 230 20 0 0 010
MC 35 150 0 0 045
MC 25 150 2 0 000
MC 25 110 2 0 000
LI 30 110 25 110 0
MC 235 150 0 0 000
LI 100 135 100 150 0
LI 65 20 230 20 0
TY 45 95 5 3 0 0 0 * BC338
TY 40 115 5 3 0 0 0 * 4k7
TY 25 115 5 3 0 0 0 * 1k
TY 10 100 5 3 0 0 0 * avanti
TY 225 95 5 3 0 0 0 * indietro
TY 235 150 5 3 0 0 0 * gnd
TY 15 155 5 3 0 0 0 * gnd
TY 225 10 5 3 0 0 0 * 36V
MC 85 40 2 1 420
FCJ
TY 90 25 4 3 0 0 0 * Q1
TY 75 50 4 3 0 0 0 * IRF9540
MC 85 125 0 0 410
FCJ
TY 105 120 4 3 0 0 0 * Q2
TY 105 130 4 3 0 0 0 * IRF540
MC 80 130 0 0 115
FCJ
TY 85 135 4 3 0 0 0 * R2
TY 85 140 4 3 0 0 0 * 8.2K
LI 80 125 80 130 0
LI 85 125 80 125 0
LI 80 140 80 150 0
SA 80 150 0
SA 80 150 0
LI 210 150 25 150 0
LI 210 150 220 150 0
LI 220 150 225 150 0
LI 210 110 220 110 0
MC 215 115 0 1 115
LI 215 115 215 110 0
MC 215 125 1 1 220
LI 215 140 215 150 0
MC 200 110 1 1 115
MC 200 110 0 1 300
FCJ
TY 190 120 4 3 0 0 0 * Q6
TY 195 100 4 3 0 0 0 *
LI 185 120 185 150 0
LI 185 40 185 100 0
LI 165 40 185 40 0
MC 185 25 0 1 115
FCJ
TY 195 25 4 3 0 0 0 * R1
TY 190 30 4 3 0 0 0 * 8.2K
LI 185 40 185 35 0
LI 185 25 185 20 0
LI 150 30 150 20 0
SA 215 110 0
SA 185 40 0
SA 185 150 0
SA 215 150 0
SA 150 150 0
SA 150 20 0
LI 150 50 150 115 0
MC 145 75 0 1 000
LI 145 75 150 75 0
SA 150 75 0
MC 215 150 0 1 045
MC 225 110 2 1 000
LI 220 110 225 110 0
LI 150 135 150 150 0
LI 205 20 60 20 0
MC 165 40 2 0 420
FCJ
TY 160 25 4 3 0 0 0 * Q3
TY 160 50 4 3 0 0 0 * IRF9540
MC 165 125 0 1 410
FCJ
TY 135 120 4 3 0 0 0 * Q4
TY 130 130 4 3 0 0 0 * IRF540
MC 170 130 0 1 115
FCJ
TY 160 135 4 3 0 0 0 * R2
TY 155 140 4 3 0 0 0 * 8.2K
LI 170 125 170 130 0
LI 165 125 170 125 0
LI 170 140 170 150 0
SA 170 150 0
SA 170 150 0
SA 65 20 0
SA 185 20 0
TY 190 95 5 3 0 0 0 * BC338
TY 200 115 5 3 0 0 0 * 4K7
SA 170 125 0
SA 100 90 0
SA 80 125 0
SA 150 95 0
MC 80 105 0 0 115
FCJ
TY 85 105 4 3 0 0 0 * R2
TY 85 110 4 3 0 0 0 * 10K
MC 170 105 0 0 115
FCJ
TY 160 105 4 3 0 0 0 * R2
TY 155 110 4 3 0 0 0 * 10K
LI 80 95 80 105 0
LI 170 90 170 105 0
TY 145 30 5 3 0 0 0 * s
TY 160 40 5 3 0 0 0 * g
TY 145 45 5 3 0 0 0 * d
TY 145 135 5 3 0 0 0 * s
TY 160 125 5 3 0 0 0 * g
TY 145 115 5 3 0 0 0 * d
TY 95 130 5 3 0 0 0 * s
TY 85 125 5 3 0 0 0 * g
TY 105 115 5 3 0 0 0 * d
TY 105 30 5 3 0 0 0 * s
TY 85 40 5 3 0 0 0 * g
TY 105 45 5 3 0 0 0 * d
Ultima Modifica 11 Anni 1 Mese fa da aduri.
Si prega Accedi o Crea un account a partecipare alla conversazione.
- aduri
-
 Autore della discussione
Autore della discussione
- Junior Member
-

Riduci
Di più
11 Anni 1 Mese fa #2
da Mauro Laurenti
Risposta da Mauro Laurenti al topic Ponte H e Segway
Ciao Antonio,
i diodi di ricircolo interni non sono in generale sufficienti a garantire la protezione del MOS stesso, per cui e' bene usare dei diodi esterni. Il recovery time di quelli interni sono di circa 150ns ma e' meglio avere un recovery time dell'ordine <50ns
Per pilotare i MOS ti consiglio di usare dei MOS driver specifici in maniera da garantire una rapida carica e scarica della capacita' del gate. Cosa che per esempio non garantisci facendo uso delle resistenze come hai fatto tu.
Saluti,
Mauro
i diodi di ricircolo interni non sono in generale sufficienti a garantire la protezione del MOS stesso, per cui e' bene usare dei diodi esterni. Il recovery time di quelli interni sono di circa 150ns ma e' meglio avere un recovery time dell'ordine <50ns
Per pilotare i MOS ti consiglio di usare dei MOS driver specifici in maniera da garantire una rapida carica e scarica della capacita' del gate. Cosa che per esempio non garantisci facendo uso delle resistenze come hai fatto tu.
Saluti,
Mauro
Si prega Accedi o Crea un account a partecipare alla conversazione.

11 Anni 1 Mese fa - 11 Anni 1 Mese fa #3
da aduri
Grazie Mauro,
tutto chiaro, per non scomodare dei driver per mosfet con un circuito di questo genere dovrei riuscire a risolvere
le obiezioni che giustamente mi hai fatto notare.
Antonio
Risposta da aduri al topic Ponte H e Segway
Grazie Mauro,
tutto chiaro, per non scomodare dei driver per mosfet con un circuito di questo genere dovrei riuscire a risolvere
le obiezioni che giustamente mi hai fatto notare.
Antonio
Ultima Modifica 11 Anni 1 Mese fa da aduri.
Si prega Accedi o Crea un account a partecipare alla conversazione.
- aduri
-
Autore della discussione
- Junior Member
-
Riduci
Di più
- Messaggi: 35
- Ringraziamenti ricevuti 2
11 Anni 1 Mese fa #4
da Mauro Laurenti
Risposta da Mauro Laurenti al topic Ponte H e Segway
Ciao,
in un certo qual modo va meglio ma devi accertarti che i gate siano propriamente pilotati.
i driver per i MOS di potenza potrebbero richiedere diverse centinaia di mA di picco e un 4049 potrebbe non essere idoneo.
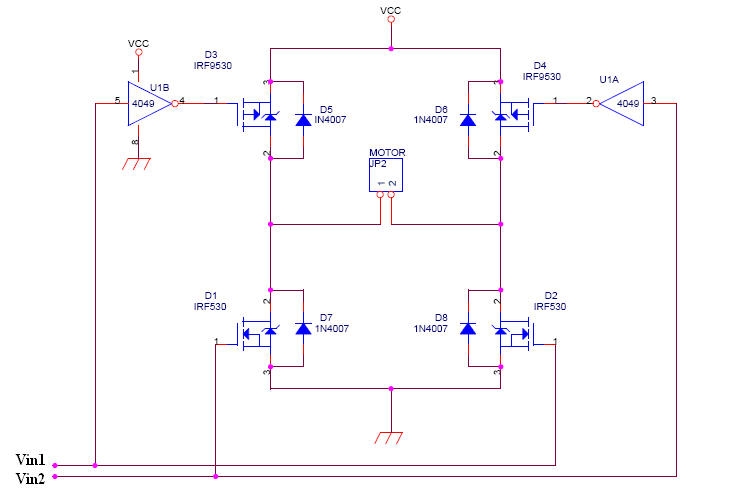
Vin1 e Vin2 devono dunque essere propriamente pilotati.
I diodi di protezione 1N4007 sono delle lumache rispetto a quelli interni ai mos che hai scelto.
Nel datasheet non trovi i tempi relativi al recovery time, dal momento che per tali diodi non e' un parametro importante.
Dovresti vedere i diodi usati in applicazioni switching.
Alcuni driver della Linear Technology (se memoria non mi inganna) li trovi anche in package DIL.
Saluti,
Mauro
in un certo qual modo va meglio ma devi accertarti che i gate siano propriamente pilotati.
i driver per i MOS di potenza potrebbero richiedere diverse centinaia di mA di picco e un 4049 potrebbe non essere idoneo.
Vin1 e Vin2 devono dunque essere propriamente pilotati.
I diodi di protezione 1N4007 sono delle lumache rispetto a quelli interni ai mos che hai scelto.
Nel datasheet non trovi i tempi relativi al recovery time, dal momento che per tali diodi non e' un parametro importante.
Dovresti vedere i diodi usati in applicazioni switching.
Alcuni driver della Linear Technology (se memoria non mi inganna) li trovi anche in package DIL.
Saluti,
Mauro
Si prega Accedi o Crea un account a partecipare alla conversazione.
11 Anni 1 Mese fa #5
da aduri
Risposta da aduri al topic Ponte H e Segway
Ciao Mauro,
grazie per le risposte.
Io pensavo, in alternativa al 4049 di usare dei transistors da 50V in configurazione emettitore comune (inv. fase) come il precedente schema.
Riguardo i diodi è un mio errore di disegno, pensavo di usare dei diodi veloci.
Altro quesito....
Il comando PWM da arduino è consigliato direttamente alle basi dei 2 BJT?
Ho visto usare in rete alcuni schemi con L.A.P. (Locked Anti Phase che conosco poco, il motore è in coppia quando è fermo) come controllo di velocità, resistenza di sense e limitazione di corrente con PWM (in modo di parzializzare l'onda quadra con un treno d'onde a frequenza parecchio più alta, si mpedisce così alla corrente di incrementarsi).
Cordiali saluti
Antonio
grazie per le risposte.
Io pensavo, in alternativa al 4049 di usare dei transistors da 50V in configurazione emettitore comune (inv. fase) come il precedente schema.
Riguardo i diodi è un mio errore di disegno, pensavo di usare dei diodi veloci.
Altro quesito....
Il comando PWM da arduino è consigliato direttamente alle basi dei 2 BJT?
Ho visto usare in rete alcuni schemi con L.A.P. (Locked Anti Phase che conosco poco, il motore è in coppia quando è fermo) come controllo di velocità, resistenza di sense e limitazione di corrente con PWM (in modo di parzializzare l'onda quadra con un treno d'onde a frequenza parecchio più alta, si mpedisce così alla corrente di incrementarsi).
Cordiali saluti
Antonio
Si prega Accedi o Crea un account a partecipare alla conversazione.
- aduri
-
Autore della discussione
- Junior Member
-
Riduci
Di più
- Messaggi: 35
- Ringraziamenti ricevuti 2
Moderatori: Mauro Laurenti, StefA, Matteo Garia
Registrati al sito
Accedi a tutte le risorse e articoli non visibili pubblicamente, puoi registrarti con pochi passi.