Ponte H con L6203 e L6506
13 Anni 4 Settimane fa #1
da doc83
Il lavoro nobilita l'uomo (e lo rende simile alla bestia)...
Ponte H con L6203 e L6506 è stato creato da doc83
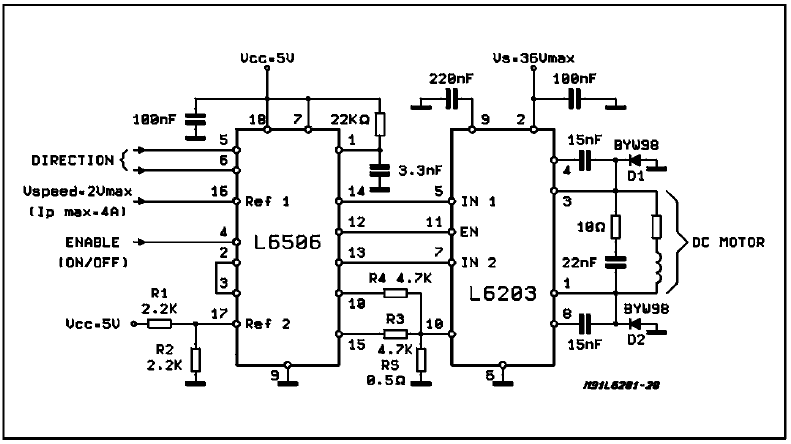
Ciao a tutti!! Stavo pensando di usare al posto del LMD18200, molto più costoso, gli L6203... sopportano fino a 4A e costano poco, quindi mi sembrano anche meglio degli LMD18200 per l'uso che devo farne!
Gironzolando ho visto questo schema sul datasheet e mi chiedevo: il segnale di controllo è in PWM? Sul datasheet del 6203 la parola PWM non è proprio presente.....
Gironzolando ho visto questo schema sul datasheet e mi chiedevo: il segnale di controllo è in PWM? Sul datasheet del 6203 la parola PWM non è proprio presente.....
Il lavoro nobilita l'uomo (e lo rende simile alla bestia)...
Si prega Accedi o Crea un account a partecipare alla conversazione.
- doc83
-
 Autore della discussione
Autore della discussione
- Elite Member
-

Riduci
Di più
13 Anni 4 Settimane fa #2
da Mauro Laurenti
Risposta da Mauro Laurenti al topic Re: Ponte H con L6203 e L6506
Ciao,
La combinazione degli integrati che hai mostrato era pensata per non usare i microcontrollori.
In particolare L6506 è pensato per controllare due L6203 ed un motore Stepper bipolare.
Nel caso tuo in cui utilizzi il PIC per controllare il driver, puoi far a meno del L6506.
L6203 ha poi solo un segnale di enable e due per il controllo della direzione (ovvero per abilitare in maniera opportuna i rami interni del ponte H). Sono presenti anche altri pin vista la tecnologia utilizzata e la necessità di un voltage boost per pilotare propriamente i driver finali.
Il ponte L6203 può essere utilizzato sia in modalità LAP (usando gli ingressi di direzione) o Signed Magnitude (usando L'enable), come descritto della Brief Note BN0006 (controllo di Motori DC e passo Passo).
Il fatto che la parola PWM non sia presente è semplicemente legata al fatto che nome alternativo alla tecnica PWM è chopping. Questa parola è invece presente nel Datasheet. In particolare L6506 si preoccupa di pilotare il L6203 in chopping, ovvero comandandolo con segnale PWM lo stesso e cercando di mantenere la corrente costante in base al valore imposto sulla Vref. L' L6506 rappresenta il controllore del driver e possiede una rete di feedback, ovvero legge la corrente, la confronta con quella impostata da Vref, e modula il PWM per mantenere l'errore a "0" o meglio minimizzarlo la loro differenza. Per maggiori dettagli fai riferimento al Datasheet dell' L6506, anche se avrai capito che nel tuo caso non ne avrai bisogno, visto che le veci di questo integrato saranno svolte dal PIC.
Saluti,
Mauro
La combinazione degli integrati che hai mostrato era pensata per non usare i microcontrollori.
In particolare L6506 è pensato per controllare due L6203 ed un motore Stepper bipolare.
Nel caso tuo in cui utilizzi il PIC per controllare il driver, puoi far a meno del L6506.
L6203 ha poi solo un segnale di enable e due per il controllo della direzione (ovvero per abilitare in maniera opportuna i rami interni del ponte H). Sono presenti anche altri pin vista la tecnologia utilizzata e la necessità di un voltage boost per pilotare propriamente i driver finali.
Il ponte L6203 può essere utilizzato sia in modalità LAP (usando gli ingressi di direzione) o Signed Magnitude (usando L'enable), come descritto della Brief Note BN0006 (controllo di Motori DC e passo Passo).
Il fatto che la parola PWM non sia presente è semplicemente legata al fatto che nome alternativo alla tecnica PWM è chopping. Questa parola è invece presente nel Datasheet. In particolare L6506 si preoccupa di pilotare il L6203 in chopping, ovvero comandandolo con segnale PWM lo stesso e cercando di mantenere la corrente costante in base al valore imposto sulla Vref. L' L6506 rappresenta il controllore del driver e possiede una rete di feedback, ovvero legge la corrente, la confronta con quella impostata da Vref, e modula il PWM per mantenere l'errore a "0" o meglio minimizzarlo la loro differenza. Per maggiori dettagli fai riferimento al Datasheet dell' L6506, anche se avrai capito che nel tuo caso non ne avrai bisogno, visto che le veci di questo integrato saranno svolte dal PIC.
Saluti,
Mauro
Si prega Accedi o Crea un account a partecipare alla conversazione.

13 Anni 4 Settimane fa #3
da doc83
Il lavoro nobilita l'uomo (e lo rende simile alla bestia)...
Risposta da doc83 al topic Re: Ponte H con L6203 e L6506
Dopo aver letto la brief note... ho capito! (strano ma vero)!
Quindi, usando gli L6203 in modalità LAP, devo procedere nel seguente modo (dimmi che ne pensi)...
Invio al PIC tramite variazione di resistenza con dei trimmer (che saranno collegati al Joystick - e che sulla freedom II sperimenterò con il trimmer "ANALOG") ai piedini di input il segnale...
In base al segnale, il pic varia il duty cycle dell'onda quadra: questo mi permette di controllare in maniera molto fine la velocità e la direzione del ROV...
Joystick avanti: tutti e due i motori avanti... con duty cycle del 100% in un ponte... joystick indietro, duty cycle di entrambi a 0%, joystick al centro: duty cycle del 50% ad entrambi...
Joystick a sinistra: duty cycle del 100% a sinistra e dello 0% a destra e viceversa...
Ovviamente usando trimmer, le variazioni sono scalari ed inversamente proporzionali per ogni PWM... come la vedi, te gusta l'idea?
Quindi, usando gli L6203 in modalità LAP, devo procedere nel seguente modo (dimmi che ne pensi)...
Invio al PIC tramite variazione di resistenza con dei trimmer (che saranno collegati al Joystick - e che sulla freedom II sperimenterò con il trimmer "ANALOG") ai piedini di input il segnale...
In base al segnale, il pic varia il duty cycle dell'onda quadra: questo mi permette di controllare in maniera molto fine la velocità e la direzione del ROV...
Joystick avanti: tutti e due i motori avanti... con duty cycle del 100% in un ponte... joystick indietro, duty cycle di entrambi a 0%, joystick al centro: duty cycle del 50% ad entrambi...
Joystick a sinistra: duty cycle del 100% a sinistra e dello 0% a destra e viceversa...
Ovviamente usando trimmer, le variazioni sono scalari ed inversamente proporzionali per ogni PWM... come la vedi, te gusta l'idea?
Il lavoro nobilita l'uomo (e lo rende simile alla bestia)...
Si prega Accedi o Crea un account a partecipare alla conversazione.
13 Anni 3 Settimane fa #4
da doc83
Il lavoro nobilita l'uomo (e lo rende simile alla bestia)...
Risposta da doc83 al topic Re: Ponte H con L6203 e L6506
Ecco la prima bozza del circuito....
In generale mi è chiaro (anche se ho copiato lo schema dal datasheet, capirai)... ho vari dubbi però:
1) Il pin enable, da datasheet, va portato ad un livello logico alto... accetta da -0.3 a +7V: quindi potrei comandarlo con i 5V della logica, o comunque direttamente dal PIC.... giusto?
2) Per la Vsense ho fatto un partitore di tensione e poi mi sono portato il tutto sulla strip pin: è corretto?
3) IN1 e IN2 non ho mica capito come pilotarli, però.... mi spiego: io genero tra il piedino X del PIC e GND una quadra (cioè se metto il puntale dell'oscilloscopio su un piedino del PIC, leggo una quadra) e poi???
4) La VREF, a quanto ne so io, variando l'intensità di corrente (mi pare prenda fino a 2mA in ingresso) viene erogata in uscita una data quantità di corrente.... serve a regolare l'amperaggio in uscita, in pratica...
Però non ho trovato nessuna relazione matematica per dimensionare la resistenza! Io voglio che escano 1.3A dal ponte... come devo fare?
So che sono domande da niubbo, ma io SONO niubbo!
Grazie!!")
In generale mi è chiaro (anche se ho copiato lo schema dal datasheet, capirai)... ho vari dubbi però:
1) Il pin enable, da datasheet, va portato ad un livello logico alto... accetta da -0.3 a +7V: quindi potrei comandarlo con i 5V della logica, o comunque direttamente dal PIC.... giusto?
2) Per la Vsense ho fatto un partitore di tensione e poi mi sono portato il tutto sulla strip pin: è corretto?
3) IN1 e IN2 non ho mica capito come pilotarli, però.... mi spiego: io genero tra il piedino X del PIC e GND una quadra (cioè se metto il puntale dell'oscilloscopio su un piedino del PIC, leggo una quadra) e poi???
4) La VREF, a quanto ne so io, variando l'intensità di corrente (mi pare prenda fino a 2mA in ingresso) viene erogata in uscita una data quantità di corrente.... serve a regolare l'amperaggio in uscita, in pratica...
Però non ho trovato nessuna relazione matematica per dimensionare la resistenza! Io voglio che escano 1.3A dal ponte... come devo fare?
So che sono domande da niubbo, ma io SONO niubbo!
Grazie!!
Allegato Schermata2011-04-17a22.48.34.png non trovato
Il lavoro nobilita l'uomo (e lo rende simile alla bestia)...
Allegati:
Si prega Accedi o Crea un account a partecipare alla conversazione.
13 Anni 3 Settimane fa #5
da Mauro Laurenti
Risposta da Mauro Laurenti al topic Re: Ponte H con L6203 e L6506
Ciao,
Riguardo al post in cui parli del Joystick, ai detto bene ma non capisco cosa intendi per variazioni scalari del trimmer.
Per assicurasi che quando il Joystick e´ in posizione di riposo i motori siano spenti metti una soglia sul controllo della posizione.
Per esempio il movimento inizia solo oltre una soglia di spostamento.
Per lo schema che hai postato c´e´ un po´ di confusione, che credo venga dal fatto che stavi usando l´LMD18200.
1) Rsens deve essere di basso valore poiché e´ in serie al motore. Normalmente si usano valori nel range 0.1 - 0.5 ohm.
La tecnica che usa LMD18200 per la misura della corrente e´ diversa (usa uno specchio di corrente sui driver MOS) e questo permette di avere resistori dell´ordine del Kohm e dissipare meno energia per la misura della corrente. Per questo aspetto l´LMD18200 e´ migliore.
2) Per quanto riguarda gli ingressi IN1 IN2, servono per comandare i rami del ponte H. In particolare IN1=0 e IN2= 1, il motore gira in un verso. IN1=1 e IN2= 0, il motore gira nell´altro verso. IN1 = IN2, sei in posizione frenante.
3) E´consigliabile avere dei resistori di pull-down sulle linee Enable, IN1, IN2 in maniera da disattivare le funzioni qualora il PIC abbia problemi o sia in fase di inizializzazione (ancora non controlla il motore)
4) Metti un condensatore da 471uF sull´alimentazione principale.
5) Vref ha un significato diverso dal Vref dell´L6506. Il Vref del L6002 e´ solamente per la stabilita´ del regolatore lineare interno all´integrato e non serve per controllare la corrente.
6) per controllare la corrente devi leggere il valore di tensione sul resistore e controllare il PWM di conseguenza. Nel tuo caso hai pero´ interesse nel controllare la velocità e non avere una corrente costante. La misura della corrente ti servirà principalmente per vedere se i motori sono in blocco. Il fatto che il ponte sia da 4A non significa che sul motore avrai 4A. Alimentando a 12V e se il motore e´ da 12V, assorbirà la corrente che gli serve e non più. Modulando in PWM e riducendo la velocità, indirettamente varierai la corrente sul motore, ma in base allo "sforzo" a cui sono sottoposti i motori, ad un determinato PWM potresti avere consumi differenti.
7) Per i filtri potresti prevedere un common mode chock sull´alimentazione del motore.
Saluti,
Mauro
Riguardo al post in cui parli del Joystick, ai detto bene ma non capisco cosa intendi per variazioni scalari del trimmer.
Per assicurasi che quando il Joystick e´ in posizione di riposo i motori siano spenti metti una soglia sul controllo della posizione.
Per esempio il movimento inizia solo oltre una soglia di spostamento.
Per lo schema che hai postato c´e´ un po´ di confusione, che credo venga dal fatto che stavi usando l´LMD18200.
1) Rsens deve essere di basso valore poiché e´ in serie al motore. Normalmente si usano valori nel range 0.1 - 0.5 ohm.
La tecnica che usa LMD18200 per la misura della corrente e´ diversa (usa uno specchio di corrente sui driver MOS) e questo permette di avere resistori dell´ordine del Kohm e dissipare meno energia per la misura della corrente. Per questo aspetto l´LMD18200 e´ migliore.
2) Per quanto riguarda gli ingressi IN1 IN2, servono per comandare i rami del ponte H. In particolare IN1=0 e IN2= 1, il motore gira in un verso. IN1=1 e IN2= 0, il motore gira nell´altro verso. IN1 = IN2, sei in posizione frenante.
3) E´consigliabile avere dei resistori di pull-down sulle linee Enable, IN1, IN2 in maniera da disattivare le funzioni qualora il PIC abbia problemi o sia in fase di inizializzazione (ancora non controlla il motore)
4) Metti un condensatore da 471uF sull´alimentazione principale.
5) Vref ha un significato diverso dal Vref dell´L6506. Il Vref del L6002 e´ solamente per la stabilita´ del regolatore lineare interno all´integrato e non serve per controllare la corrente.
6) per controllare la corrente devi leggere il valore di tensione sul resistore e controllare il PWM di conseguenza. Nel tuo caso hai pero´ interesse nel controllare la velocità e non avere una corrente costante. La misura della corrente ti servirà principalmente per vedere se i motori sono in blocco. Il fatto che il ponte sia da 4A non significa che sul motore avrai 4A. Alimentando a 12V e se il motore e´ da 12V, assorbirà la corrente che gli serve e non più. Modulando in PWM e riducendo la velocità, indirettamente varierai la corrente sul motore, ma in base allo "sforzo" a cui sono sottoposti i motori, ad un determinato PWM potresti avere consumi differenti.
7) Per i filtri potresti prevedere un common mode chock sull´alimentazione del motore.
Saluti,
Mauro
Si prega Accedi o Crea un account a partecipare alla conversazione.
Moderatori: Mauro Laurenti, StefA, Matteo Garia
Registrati al sito
Accedi a tutte le risorse e articoli non visibili pubblicamente, puoi registrarti con pochi passi.